
2025 / 2026
- Demonstration of coordination of industrial robots in the transfer of a structural profile
-
Authors: Daniel Głąbicki, Marcin Kaczmarek, Mateusz Kuc, Wojciech Jankowski, Mateusz Kaczmarczyk, Justyna Biegun, Franciszek Pikoń, Radosław Antończyk, Kacper Polewka
Supervision: dr hab. inż. Adam Piłat
The project aims to adapt two industrial robots to collaboratively handle a single aluminum profile. The core design concept focuses on precise synchronization and coordination between manipulators equipped with custom-designed grippers. The robots will be programmed to perform synchronized motion, calibrated based on trajectory data to minimize deformation of the profile, and integrated with a remote monitoring and vision system enabling flexible task execution within the workspace.
2024 / 2025
- Hybrid control (intelligent and classical) for structurally non-balanced robotic arm
-
Authors: Franek Korpan, Marcin Kaczmarek, Mateusz Kuc, Wojciech Jankowski
Supervision: dr hab. inż. Adam Piłat
The project aims to develop a proprietary control method for a custom-built robotic arm characterized by structural instability. The main objective is to design the control algorithm and conduct experimental studies using a prototype that validates prior theoretical analyses. The research focuses on a robot arm with rotary and linear joints lacking gear transmissions, requiring direct torque and force control—making it a valuable platform for studying advanced, intelligent, and learning-based control methods.

- Roboroller - a robot on skis
-
Authors: Daniel Głąbicki, Filip Połatyński, Igor Siata, Jakub Gajewski, Jakub Głód, Jakub Janik, Jan Skarboń, Maksymilian Kania, Marcin Dworak, Mateusz Kaczmarczyk, Michał Furgała, Piotr Kwapień, Szymon Klimczak
Supervision: dr hab. inż. Adam Piłat
The RoboRoller project aims to build a bipedal robot moving on roller skis, based on existing mathematical models and mechanical components. The core design idea is to combine balance control and dynamic motion with a lightweight, modular structure enabling safe experimentation and rapid prototyping. The project’s goal is to create a research platform for testing advanced control methods, including artificial intelligence, vision systems, and spatial sensing technologies.

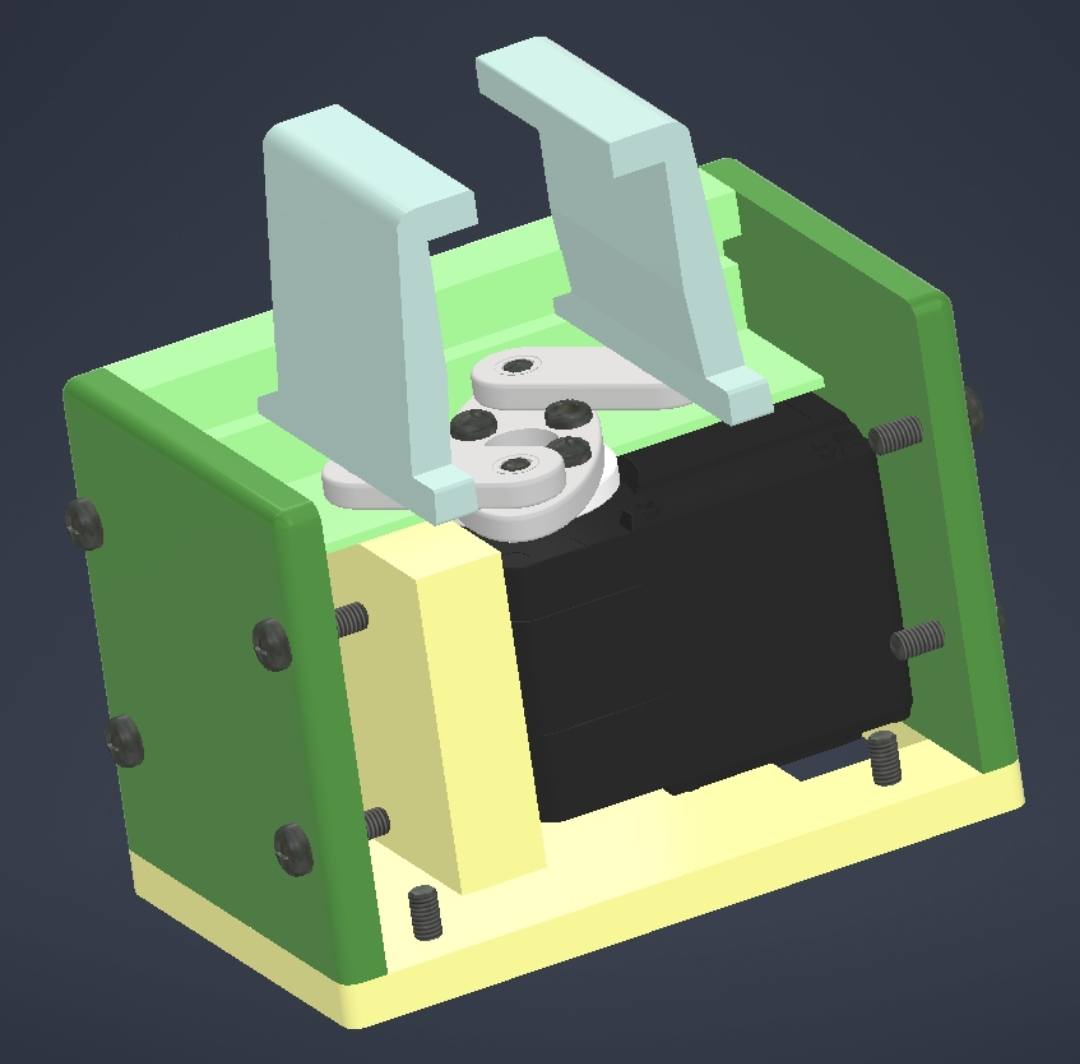
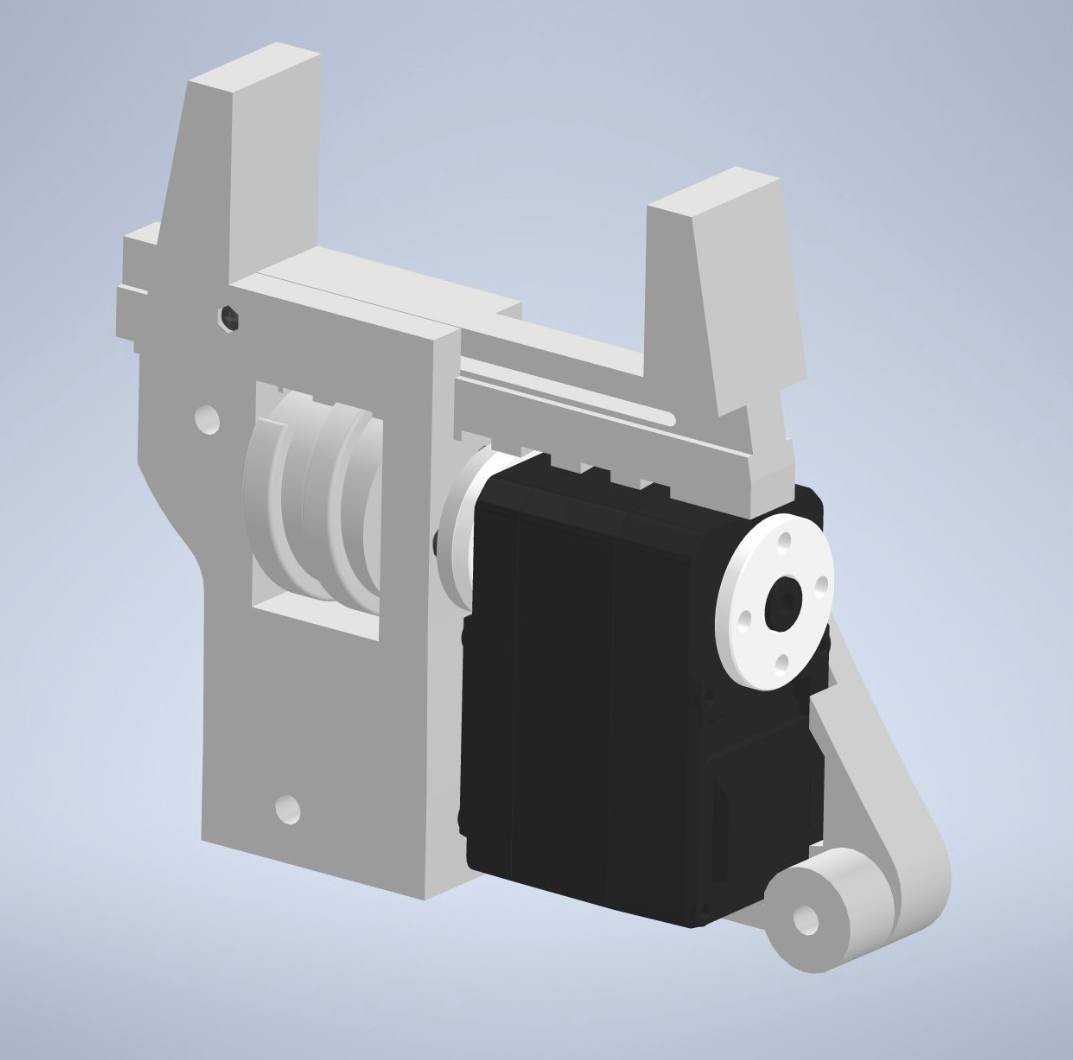
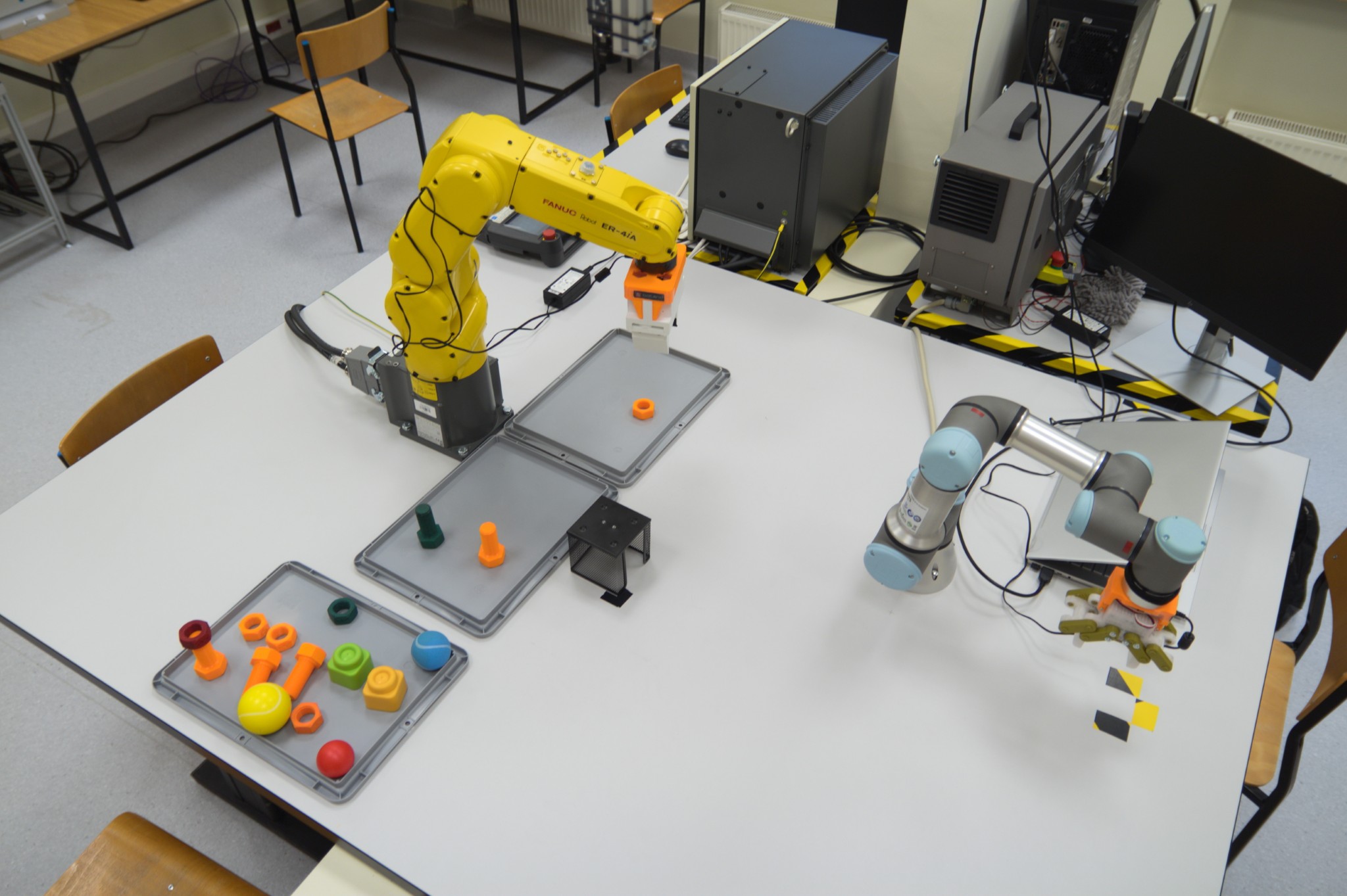
- Demonstration of the ability of robots to cooperate in sorting various mechanical parts
-
Authors: Daniel Głąbicki, Filip Połatyński, Franek Korpan, Igor Siata, Jakub Gajewski, Jakub Głód, Jakub Janik, Jan Skarboń, Maksymilian Kania, Marcin Dworak, Marcin Kaczmarek, Mateusz Kaczmarczyk, Mateusz Kuc, Michał Furgała, Piotr Kwapień, Wojciech Jankowski
Supervision: dr hab. inż. Adam Piłat
The project aims to enable two robots to collaborate by equipping them with custom-designed grippers and integrating vision systems. The robots will be programmed to identify and sort randomly scattered objects within their workspace autonomously.
2020 / 2021
- Positioning module for a collaborative robot supporting the Pick-and-Place task
-
Authors: Hubert Milanowski, Tomasz Bednorz
Supervision: dr hab. inż. Adam Piłat
- Development of test infrastructure for legged robotic research
-
Author: Hubert Milanowski, Dawid Lech, Mateusz Kwaśny
Supervision: dr hab. inż. Adam Piłat
2019 / 2020
- Design and control strategy of bipedal platform
-
Author: Hubert Milanowski, Dawid Lech, Mateusz Kwaśny, Natalia Frankowska, Szymon Folek
Supervision: dr hab. inż. Adam Piłat
2018 / 2019
- Design and control strategy of an autonomous robot imitating the behavior of the Meroles Anchietae lizard
-
Author: Paweł Gakan, Dawid Lech, Mateusz Kwaśny, Edyta Malcharek, Piotr Wzorek, Rafał Zalewski
Supervision: dr hab. inż. Adam Piłat
Previous years
- Robot Controled by Gestures
-
Authors: Zofia Trzaskalik, Patrycja Tokarczyk, Piotr Gołyzniak, Gabriel Filipek, Kamilń, Jakub Pegza, Jakub Jażdżyk Supervision: dr inż. Paweł Rotter
The goal of this project was creation of robot controlled by gesture and able to follow the specific marker but also implementing simple stereo vision algorithm. Our work was possible to achieve thanks to funds from "Grant Rektorski 2017" competition and funds from our faculty.
- Self-driving mobile robot
-
Authors: Piotr Banaszkiewicz, Wojciech Błachowicz, Rafał Kozik, Filip Kubicz, Mikołaj Mularczyk Wojciech Kleszcz, Mateusz Polański, Bartosz Sowa
- Application of stereovision to trajectory following in 3D space
-
Authors: Grzegorz Łojek and Michał Dajda
Supervision: dr inż. Paweł RotterThe goal of this project is the development of stereovision system for trajectory reconstruction of objects moving at a high speed in 3D space. The computations are performed in Matlab environment. The laboratory station which is being developed in this project includes the calibration pattern, two high-speed cameras (up to 1200 fps) and the software for data analysis and calculation of the trajectory.
- Automatic creation of 3D plans of buildings
-
Authors: Robert Drab
Supervision: dr inż. Paweł RotterIn this project we apply stereovision methods for automatic creation of 3-dimentional plans of interiors. At the first stage we develop the algorithms for sparse disparity estimation from a stereo pair. The project focuses on using more than 2 cameras and camera motion for solving the partial obstructions problem. We also plan to do some research on increasing the accuracy of depth estimation by using several cameras. The software is being developed in Matlab environment.
- Self-propelled vehicle with vision-based navigation system
-
Authors: Piotr Włodarczyk and Krzysztof Skowronek
Supervision: dr inż. Paweł RotterIn this project we made a small vehicle driven by two independent electrical engines controlled with RS232 interface, equipped with camera. It is connected to a PC with USB cable (image transfer) and RS232 (control data transfer). In the future we plan to replace cables with a cordless connection. Presently we are working on the software for automatic control of the vehicle, especially for obstacles detection and avoidance. In order to facilitate orientation and the reliability of obstacle detection the vehicle has been equipped with several laser pointers.
- Fingerprint-based identification of people
-
Authors: Tomasz Dziwiński
Supervision: dr inż. Paweł RotterThe first stage of this project is a comparison of filtration methods and selection of the best method for enhancing fingerprint images. This stage is necessary for the correct detection of minutiae, which are then used to uniquely identify a person. Faultless minutiae detection requires images of a very high quality, without the noise which always appears in images provided by any type of fingerprint scanners.